HI600 用户手册
老型号
HI600 为较早推出的型号,本手册集中归档保留。最新型号请见在产型号手册。
双频多星座GNSS高精度RTK定位模组, Rev 1.0
适用于 HI600D、HI600R
文档变更历史
| 版本 | 日期 | 作者 | 变更内容 |
|---|---|---|---|
| V1.0 | 2022年6月18日 | HiPNUC | 初始版本 |
简介
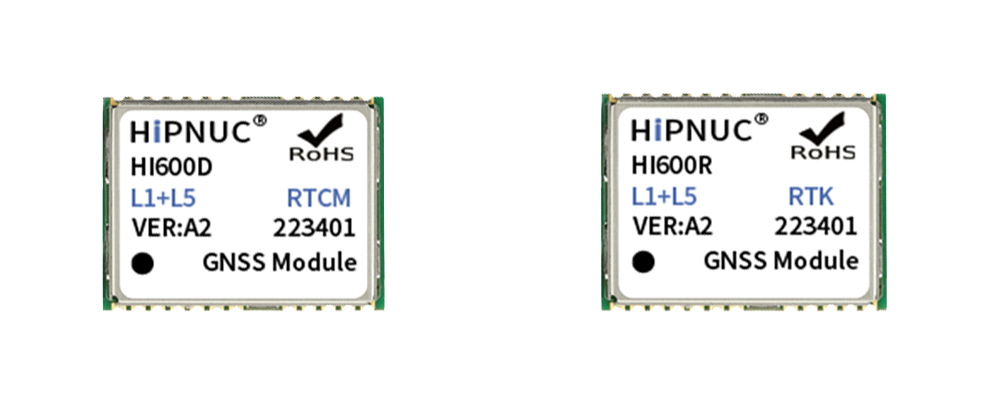
HI600系列是一款高精度的L1、L5双频GNSS接收机模块,能同时支持GPS、Beidou、Glonass、Galileo、QZSS,并且拥有极高的定位精度、出色的定位速度。 HI600系列可输出标准的RTCM3.3 数据流,支持星历数据和原始观测输出(RTCM3.3数据流)。模块内置双频RTK算法,可提供稳定的厘米级高精度位置服务。 HI600系列包含两个型号:
- HI600R:可输出NMEA位置结果,RTCM原始数据,内置RTK解算引擎,可输出差分RTK定位结果。
- HI600D:无内置RTK解算引擎,其他指标与HI600R相同。
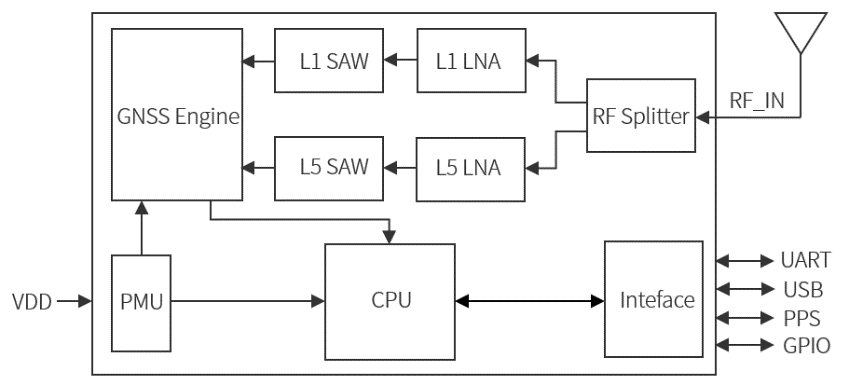
系统架构
HI600系列内部集成了多频点的射频前端,双频GNSS处理引擎,MCU、接口、以及电源管理等单元。HI600系列系统框图如下:
主要特点
- L1+L5 双频,L1 支持GPS, GLO, GAL, BDS, QZSS, SBAS 系统,L5 支持GPS, GAL, BDS, QZSS
- 内置双频多星座RTK解算引擎
- 可输出RTCM3.3数据流
- 支持PPS 授时,精度可达±15ns,PPS 与NMEA 相关联
- 最多可追踪75 颗L1 卫星以及60 颗L5 卫星
- 冷启动小于28s (CTTFF is 24s with GLO);热启动小于1s
- 支持AGNSS/SBAS星基差分校正
- 符合ROHS, FCC, CE 标准
- 12 x 16mm标准封装,兼容主流同类型GNSS模块
评估套件
我们为用户准备了HI600DK_USB评估套件,拥有如下资源:
- 板载USB-Serial converter(CP2102N)
- 集成HI600系列模组
- 2.54排针数据接口
- 静电防护 IEC61000-4-2 ESD ±15KV
典型应用
得益于我们对HI600系列的深度算法开发,HI600系列可以输出标准的RTCM数据流,星历数据、原始观测量以及厘米级位置输出,因此HI600系列非常适合如下应用场合:
- 高精度RTK/GNSS测向
- 形变、位置监测
- 授时
- 无人驾驶
- 精准农业
- 无人机
订购信息
| 料号 | 型号 | 规格描述 | 环保标准 |
|---|---|---|---|
| PM01-11001 | HI600D | 高精度L1、L5双频定位模块 | RoHS |
| PM01-11002 | HI600R | 高精度L1、L5双频RTK定位模块 | RoHS |
性能参数
整体性能
| 参数 | 指标 | 备注 |
|---|---|---|
| 接收机类型 | 高精度的L1、L5双频GNSS接收机模块,能同时支持GPS、Beidou、Glonass、Galileo、QZSS | |
| PPS授时精度 | ±15ns | |
| 最大加速度 | 4g | |
| 最大速度 | 515m/s | |
| 速度精度 | 0.1m/s | |
| 数据更新率 | 1-10Hz 默认1Hz,包含RTCM和NEMA ==RTK最高1hz数据更新率== | |
| 导航数据格式 | NMEA0183 V4.1 或 RTCM3.3 |
GNSS性能
| GNSS基带参数 | 指标 |
|---|---|
| L1(1602MHz) | GLONASS L1OF |
| L1(1575.42MHz) | GPS L1CA, QZSS L1CA, SBAS L1,QZSS L1 SAIF, Galileo E1(E1B+E1C) |
| L1(1561.098MHz) | BeiDou B1l |
| L5(1176.45MHz) | GPS L5, QZSS L5, Galileo E5a, BeiDou B2a |
| 驻波比 | <= 1.5 |
| 输入阻抗 | 50Ω±10% |
| 天线增益 | 0-32dB |
| GNSS启动参数 | 指标 | 单位 | 备注 |
|---|---|---|---|
| TTFF(首次定位时间, 冷启动) | <=28 | s | |
| TTFF(首次定位时间, 热启动) | <= 1 | s | |
| TTFF(重捕获) | <= 1 | s |
| GNSS定位参数 | 指标 | 单位 | 备注 |
|---|---|---|---|
| 灵敏度(捕获) | -146 | dBm | |
| 灵敏度(重捕获) | -160 | dBm | |
| 灵敏度(跟踪) | -164 | dBm | |
| 精度(单点定位) | <1.5 | m | 开放天空, CEP50 |
| 精度(RTK FIX)水平 | 0.025+1ppm | m | 开放天空,RMS |
| 精度(RTK FIX)高程 | 0.05+1ppm | m | 开放天空,RMS |
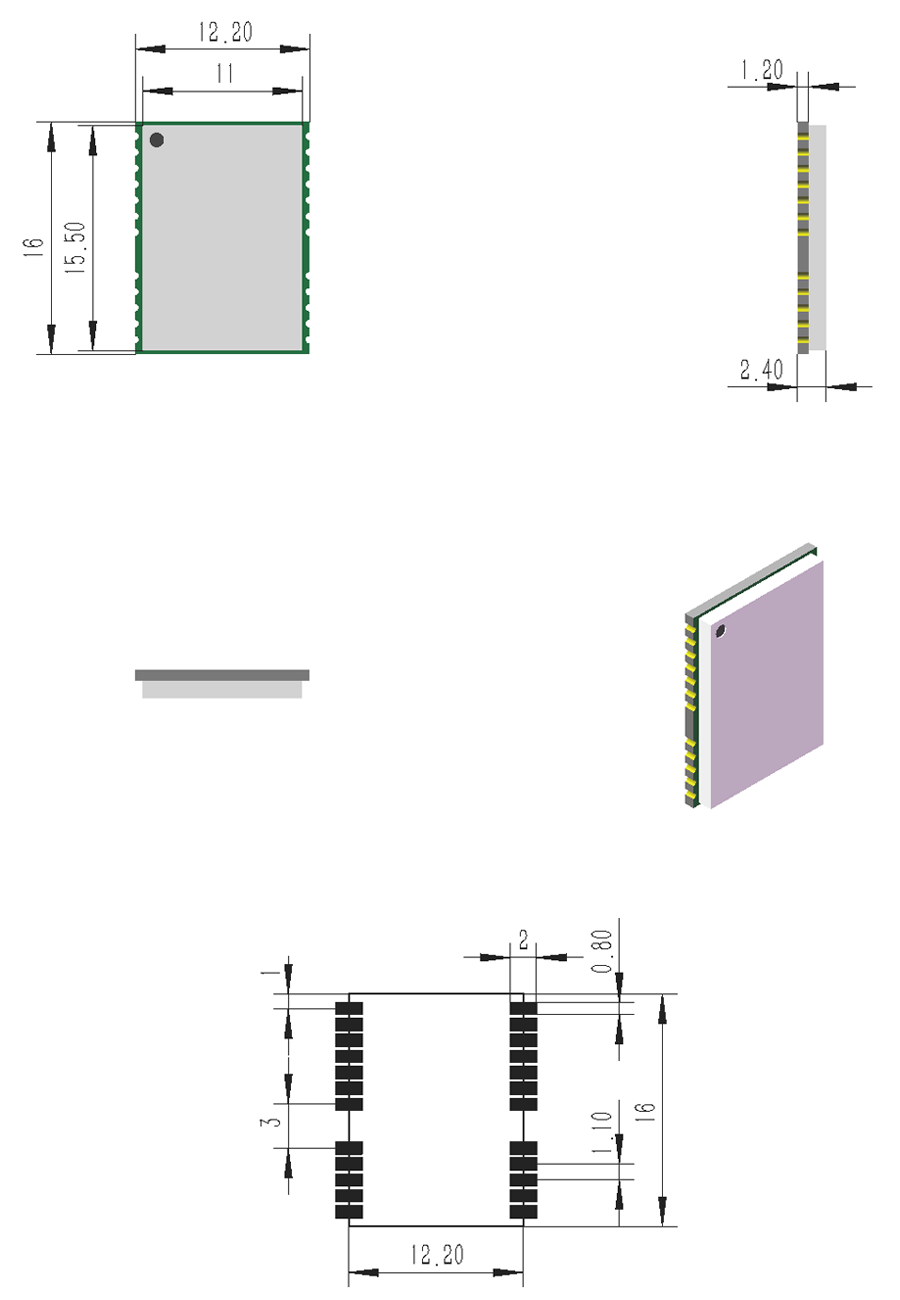
电气与机械参数
HI600系列尺寸图
所有单位均为mm
HI600系列引脚描述
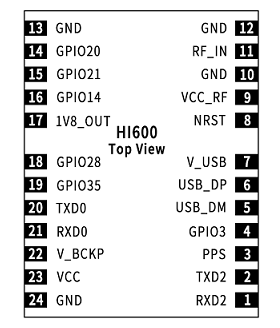
| 引脚号 | 引脚名称 | 最高电压 | 说明 |
|---|---|---|---|
| 1 | RXD2 | 2.8V | UART2_RX, 备用串口, 不用可悬空 |
| 2 | TXD2 | 2.8V | UART2_TX, 备用串口, 不用可悬空 |
| 3 | PPS | 2.8V | PPS输出,1Hz,脉宽100ms |
| 4 | GPIO3 | 2.8V | 通用GPIO |
| 5 | USB_DM | 保留,悬空 | |
| 6 | USB_DP | 保留,悬空 | |
| 7 | V_USB | 保留,悬空 | |
| 8 | NRST | 1.8V | 10us低脉冲可复位模块,内部上拉,不用可悬空 |
| 9 | VCC_RF | 外部有源天线供电 | |
| 10 | GND | GND | GND |
| 11 | RF_IN | GNSS RF 信号输入 | |
| 12 | GND | GND | GND |
| 13 | GND | GND | GND |
| 14 | GPIO20 | 1.8V | 通用GPIO,保留,可悬空 |
| 15 | GPIO21 | 1.8V | 通用GPIO,保留,可悬空 |
| 16 | GPIO14 | 1.8V | 通用GPIO,保留,可悬空 |
| 17 | 1V8_OUT | 1.8V | 电源输出1.8V,建议悬空 |
| 18 | GPIO28 | 1.8V | 通用GPIO,保留,可悬空 |
| 19 | GPIO35 | 1.8V | 通用GPIO,保留,可悬空 |
| 20 | TXD0 | 2.8V | UART0_TX, 默认模块串口数据输出 |
| 21 | RXD0 | 2.8V | UART0_RX, 默认模块串口数据输入 |
| 22 | V_BCKP | 3.0-3.6V | 备份电源输入 |
| 23 | VCC | 3.2-3.6V | 系统电源:3.2-3.6V, 需要电源提供不小于500mA的电流输出能力 |
| 24 | GND | GND | GND |
2.8V IO引脚可通过串联1KΩ电阻与3.3V 电平逻辑IO相连(见参考电路章节)
电气与机械参数
25℃时HI600系列引脚电气和机械特性如下表所示:
| 类型 | 条件 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|---|
| 电源输入VCC、VUSB | - | 3.2 | 3.3 | 3.6 | V |
| 1.8V电源输出 | - | 1.78 | 1.8 | 1.82 | V |
| 1.8V电源电流 | - | - | 50 | - | mA |
| 天线电源VCC_RF | - | 3.2 | VCC | 3.6 | V |
| 天线电源电流IVCC_RF | - | - | - | 100 | mA |
| 备份电源输入V_BCKP | - | -0.3 | 3.0 | 3.3 | V |
| 备份电源电流IV_BCKP | - | - | 0.16 | - | mA |
| 2.8V逻辑电平阈值VIH | - | 1.5 | - | VCC | V |
| 2.8V逻辑电平阈值VIL | - | - | 0.8 | V | |
| 1.8V逻辑电平阈值VIH | - | 1.0 | - | VCC | V |
| 1.8V逻辑电平阈值VIL | - | - | 0.4 | V | |
| 2.8V逻辑电压最大值 | - | - | - | 3.6 | V |
| 1.8V逻辑电压最大值 | - | - | - | 1.98 | V |
| IO电流VIO | - | -10 | - | 10 | mA |
| 功耗P | 未接有源天线 | - | 250 | - | mW |
| 数据接口 | UART0、UART2双串口 波特率9600bps-921600bps | ||||
| 尺寸 | 12.2mmX16mmX2.4mm | ||||
| ESD | HBM 1KV,CDM 500V | ||||
| 工作储温度 | -20℃-85℃ | ||||
| 存储温度 | -40℃-85℃ | ||||
严禁用户在设计电路时,超过上述所规定的电流电压范围,推荐使用>=500ma的LDO或者DC-DC为模块提供电源
接口与协议配置
默认接口配置
本模块支持双串口配置。UART0用于数据输出配置, UART2用于RTCM 输出和输入,UART IO信号为TTL电平,默认波特率为115200。波特率/协议输出种类和速率用户均可配置。
串口0默认配置:
- UART0_TX: 默认输出NMEA消息,包含GGA,GSV,RMC,VTG,ZDA。 也可以配置为RTCM差分数据输出,或者NMEA+RTCM
- UART0_RX: 可输入PAIR指令配置信息和RTCM3.3差分校准数据
串口2默认配置:
- UART2_TX: 默认输出RTCM差分消息。 也可以配置为NMEA输出,或者NMEA+RTCM
- UART2_RX: 可输入PAIR指令配置信息和RTCM3.3差分校准数据
NMEA0183 V4.10 协议
NMEA协议以'$'为起始字段,后面跟描述符,ID和数据段,数据段以'*****'结尾,结尾后补两位校验码最后加回车换行(<CR><LR>结束)
NMEA 消息格式ASCII信息结构:
$--<消息类型标识>,<数据字段>,<数据字段>,……,<数据字段>*<校验>和><CR><LF>| 字段 | 字段说明 |
|---|---|
| $ | 起始符(ASCII 码字符HEX24)。消息开始的标志。 |
| --- | 卫星系统类别,用于区分北斗、GPS、兼容输出信息类别。 BD-北斗 GP-GPS GN-兼容 |
| 消息类型标识 | 用于区别消息的种类和功能。固定宽度为3 位的英文字符,建议使用大写英文字母。本协议中定义参数消息、询问消息和专用消息三类消息。 |
| , | 字段分隔符(ASCII 码字符HEX 2C)。分隔消息中多个字段。 |
| 数据字段 | 每个消息可包含多个被字段分隔符“,”分开的数据字段。除特殊说明外,数据字段中只允许使用可打印ASCII 码字符。数据传输时,只有通过分隔符“,”确定数据字段在一条消息中的位置,即通过对分隔符的计数来确定字段位置,而不应从消息的开始对接收到的字符的总个数来计数。 |
| * | 校验和定界符。为数据内容和校验和字段的分隔符。 |
| 校验和 | 校验和为消息中$和*之间(不含符号$和*)全部字符按字节异或的结果,前4 比特和后4 比特的16 进制数分别以ASCII 码表示(0~9,A~F),高位在前。 |
| <CR><LF> | 终止符(ASCII 码字符HEX0D0A)。标志一个消息的结束。 |
模块支持的NMEA语句:
| NMEA协议 | 描述 |
|---|---|
| GGA | 定位数据,RTC时间,服务质量,可见星 |
| GSA | 当前卫星及DOP值 |
| GSV | 可见卫星及卫星高度角仰角和SNR |
| RMC | 最小推荐定位信息 |
| VTG | 当前地面速度 |
| ENU | 自定义NMEA协议: RTK模式下相对于基站的ENU向量, 只有在 float 或 fix 状态下才会输出 |
GGA
接收机的时间、位置和定位相关数据。ASCII 示例:
$GPGGA,062134.00,2813.9908005,N,11252.6285300,E,1,28,0.5,83.684,M,-17.038,M,0.000,0000*60| ID | 示例 | 格式 | 描述 |
|---|---|---|---|
| 1 | $GPGGA | 起始符+消息类型标识 | |
| 2 | 062134.00 | hhmmss.ss | UTC 时间 |
| 3 | 2813.9908005 | ddff.ff | 纬度,28°13.9908005′,取值范围为0°~90°小数点前保留2 位为分,其余为度 |
| 4 | N | - | 纬度方向N/S, N-北纬,S-南纬 |
| 5 | 11252.6285300 | dddff.ff | 经度,112°52.6285300′,取值范围为0°~180°小数点前保留2 位为分,其余为度。 |
| 6 | E | - | 经度方向E/WE-东经,W-西经7 |
| 7 | 1 | x | 0:无效解;1:单点定位解;2:伪距差分;4:固定解;5:浮动解。 |
| 8 | 28 | xx | 参与定位解算卫星数 |
| 9 | 0.5 | x.x | HDOP:水平位置精度因子 |
| 10 | 83.684 | x.xxx | 海拔高 |
| 11 | M | U | 海拔高单位:m |
| 12 | -17.038 | x.x | 高程异常值:WGS84 大地高和海拔高的差距“-”表示海平面低于WGS84 椭球面 |
| 13 | M | U | 高程异常值单位:m |
| 14 | 0.000 | xxxx | 差分龄期,单位:s |
| 15 | 0000 | x.x | 差分站台ID |
| 16 | 60 | hh | 校验 |
GSV
输出可视的卫星状态,包括:可视的卫星数、卫星标识号、仰角、方位角及信噪比(SNR)。ASCII 示例:
$GPGSV,3,3,10,26,82,187,47,28,43,056,46,,,,,,,,*77| ID | 示例 | 格式 | 描述 |
|---|---|---|---|
| 1 | $GPGSV | 起始符+消息类型标识 | |
| 2 | 3 | x.x | GSV 消息总数 |
| 3 | 3 | x.x | 当前GSV 消息序号 |
| 4 | 10 | xx | 视野内卫星数 |
| 5 | 26 | xxx | 卫星号 |
| 6 | 82 | x.x | 卫星仰角,单位:度 |
| 7 | 187 | x.x | 卫星方位角,单位:度 |
| 8 | 47 | x.x | 信噪比 |
| ...... | 28,43,056,46 | - | 重复4~7 字段,表示其他卫星信息 |
| ...... | ,,,,,,,, | 每条消息最多传输4 颗卫星的信息,如果剩余需要输出信息的卫星不足4 颗,按实际数目输出,其余字以“,,,”填充。 | |
| n | 77 | hh | 校验 |
RMC
最简导航传输数据。ASCII 示例:
$GPRMC,020550.00,A,2813.9891299,N,11252.6278784,E,0.033,315.7,161117,0.0,E,A*30| ID | 示例 | 格式 | 描述 |
|---|---|---|---|
| 1 | $GPRMC | $--RMC | 起始符+消息类型标识 |
| 2 | 020250.00 | hhmmss.ss | UTC 时间 |
| 3 | A | x.x | 定位状态:A-有效定位,V-无效定位 |
| 4 | 2813.9891299 | ddff.ff | 纬度:28°13.99891299′,取值范围为0°~90°小数点前保留2 位为分,其余为度。 |
| 5 | N | - | 纬度方向:N-北纬,S-南纬 |
| 6 | 11252.6278784 | dddff.ff | 经度:112°52.6278784′,取值范围为0°~180° 小数点前保留2 位为分,其余为度。 |
| 7 | E | - | 经度方向:E-东经,W-西经 |
| 8 | 0.033 | x.x | 地面速度,单位:节(N) |
| 9 | 315.7 | x.x | 地面航向,以真北为参考基准,沿顺时针方向至航向的角度。(取值范围0°~360°) |
| 10 | 161117 | ddmmyy | 日期,日月年 |
| 11 | 0.0 | x.x | 磁偏角,单位:度 |
| 12 | E | - | 磁偏角方向 |
| 13 | A | - | 模式指示:N=数据无效;A=自主定位;E=估算;D=差分;M=手动输入 |
| 14 | 30 | hh | 校验 |
VTG
输出地面速度信息。ASCII 示例:
$GPVTG,134.395,T,134.395,M,0.019,N,0.035,K,A*33| ID | 示例 | 格式 | 描述 |
|---|---|---|---|
| 1 | $GNVTG | 起始符+消息类型标识 | |
| 2 | 134.395 | xxx.xxx | 地面航向,以真北为参考基准,000~359.999° |
| 3 | T | U | 真北标示符 |
| 4 | 134.395 | xxx.xxx | 地面航向,以磁北为参考基准,000~359.999° |
| 5 | M | U | 磁北标示符 |
| 6 | 0.019 | xxx.xxx | 水平运动速度000~999,单位:节(海里/h) |
| 7 | N | U | 单位,N 表示海里每小时 |
| 8 | 0.035 | xxx.xxx | 水平运动速度 000~999,单位:km/h |
| 9 | K | U | 单位,K 表示千米每小时 |
| 10 | A | U | A-自主定位;D-差分;E-估算;M-手动输入;N-数据无效。 |
| 11 | 33 | hh | 校验 |
ENU
输出不同滤波条件下,流动站相对于基准站的东向、北向、天向距离。ASCII 示例:
$GPENU,120446.00,-1301.1411,-42.4221,10.2936,1,-1301.1396,-42.4226,10.2876,1,-1301.1396,-42.4226,10.2876,0,-1301.1396,-42.4226,10.2876,0,-1301.1396,-42.4226,10.2876,0,-1301.1396,-42.4226,10.2876,0,4,24,1.000*47ENU只有当HI600处于RTK模式且有float或fix解的时才会输出
| ID | 示例 | 格式 | 描述 |
|---|---|---|---|
| 0 | $GPENU | 起始符+消息类型标识 | |
| 1 | 120446.00 | hhmmss.ss | UTC 时间 |
| 2 | -1301.1411 | xx.xx | De 东向距离,单位:m(流动站相对于基准站的东向距离) |
| 3 | -42.4221 | xx.xx | Dn 北向距离,单位:m(流动站相对于基准站的北向距) |
| 4 | 10.2936 | xx.xx | Du 天向距离,单位:m(流动站相对于基准站的天向距离) |
| 5 | 1 | a | 滤波次数指示,1s 滤波输出滤波窗:1-滤波次数达到了设置的滤波窗口大小;0-滤波次数未达到设置的滤波窗口大小。 |
| 6 | -1301.1396 | xx.xx | De 东向距离,单位:m |
| 7 | 42.4226 | xx.xx | Dn 北向距离,单位:m |
| 8 | 10.2876 | xx.xx | Du 天向距离,单位:m |
| 9 | 1 | a | 滤波次数指示,1min 滤波输出滤波窗 |
| 10 | -1301.1396 | xx.xx | De 东向距离,单位:m |
| 11 | -42.4226 | xx.xx | Dn 北向距离,单位:m |
| 12 | 10.2876 | xx.xx | Du 天向距离,单位:m |
| 13 | 0 | a | 滤波次数指示,15min 滤波输出滤波窗 |
| 14 | -1301.1396 | xx.xx | De 东向距离,单位:m |
| 15 | -42.4226 | xx.xx | Dn 北向距离,单位:m |
| 16 | 10.2876 | xx.xx | Du 天向距离,单位:m |
| 17 | 0 | a | 滤波次数指示,1h滤波输出滤波窗 |
| 18 | -1301.1396 | xx.xx | De 东向距离,单位:m |
| 19 | -42.4226 | xx.xx | Dn 北向距离,单位:m |
| 20 | 10.2876 | xx.xx | Du 天向距离,单位:m |
| 21 | 0 | a | 滤波次数指示,12h 滤波输出滤波窗 |
| 22 | -1301.1396 | xx.xx | De 东向距离,单位:m |
| 23 | -42.4226 | xx.xx | Dn 北向距离,单位:m |
| 24 | 10.2876 | xx.xx | Du 天向距离,单位:m |
| 25 | 1 | a | 滤波次数指示,24h 滤波输出滤波窗 |
| 26 | 4 | a | 定位状态:0-未定位;1-单点解;4-固定解;5-浮点解。 |
| 27 | 24 | xx | 参与解算的卫星数 |
| 28 | 1.000 | xxxx | 差分数据时间 |
| 29 | 47 | hh | 校验和 |
RTCM3.3 协议
RTCM 是一种普遍采用的数据传输格式,它是由国际海运事业无线电技术委员会提出的,用于制定在差分全球导航定位系统和实时动态操作时使用的标准。模块可输出RTCM3.3差分报文,用于作为基准站向其他外部设备(或另外一个模块)发送差分校正报文进行RTK定位。
| 序号 | 数据内容 | 比特数/bit | 备注 |
|---|---|---|---|
| 1 | 同步码 | 8 | 设为‘11010011’,十六进制为‘D3’ |
| 2 | 保留 | 6 | 设为‘000000’ |
| 3 | 信息长度 | 10 | 数据信息的长度,以字节数表示 |
| 4 | 数据信息 | 不定 | 最大 1023bytes,若不是整数字节,最后一个字节用 0 补足整字节数 |
| 5 | CRC | 24 | 校验 |
模块支持的RTCM3.3语句为:
| RTCM3.3 Message | 描述 |
|---|---|
| 1005 | 天线位置参考坐标 |
| 1019 | GPS星历 |
| 1020 | GLONASS星历 |
| 1042 | BDS星历 |
| 1044 | QZSS星历 |
| 1046 | Galileo星历 |
| 1074 | GPS MSM4, 全GPS 伪距和载波相位加信号强度 |
| 1084 | GLONASS MSM4, 全GLONASS 伪距和载波相位加信号强度 |
| 1094 | Galileo MSM4 观测值, 全伽利略伪距和载波相位加信号强度 |
| 1114 | QZSS MSM4 观测值, 全QZSS 伪距和载波相位加信号强度 |
| 1124 | Beidou MSM4 观测值, 全北斗伪距和载波相位加信号强度 |
配置协议
PAIR指令
模块使用类似NMEA的PAIR指令协议来配置参数,语法为:
PAIR 消息格式ASCII信息结构:
$PAIR<指令号>,<数据字段>,<数据字段>,……,<数据字段>*<校验>和><CR><LF>| 字段 | 字段说明 |
|---|---|
| $ | 起始符(ASCII 码字符HEX24)。消息开始的标志。 |
| --- | PAIR |
| 指令号 | 000 - 999代表不同的指令 |
| , | 字段分隔符(ASCII 码字符HEX 2C)。分隔消息中多个字段。 |
| 数据字段 | 每个消息可包含多个被字段分隔符“,”分开的数据字段。除特殊说明外,数据字段中只允许使用可打印ASCII 码字符。数据传输时,只有通过分隔符“,”确定数据字段在一条消息中的位置,即通过对分隔符的计数来确定字段位置,而不应从消息的开始对接收到的字符的总个数来计数。 |
| * | 校验和定界符。为数据内容和校验和字段的分隔符。 |
| 校验和 | 校验和为消息中$和*之间(不含符号$和*)全部字符按字节异或的结果,前4 比特和后4 比特的16 进制数分别以ASCII 码表示(0~9,A~F),高位在前。 |
| <CR><LF> | 终止符(ASCII 码字符HEX0D0A)。标志一个消息的结束。 |
常用配置指令表
| 常用设置 | 指令内容 |
|---|---|
| 设置UART0只输出RTCM | $PAIR862,0,0,252*2F |
| 设置UART0只输出NMEA(默认) | $PAIR862,0,0,237*2C |
| 设置UART0输出NMEA+RTCM | $PAIR862,0,0,253*2E |
| 设置UART0波特率为9600 | $PAIR864,0,0,9600*13 |
| 设置UART0波特率为57600 | $PAIR864,0,0,57600*28 |
| 设置UART0波特率为115200 | $PAIR864,0,0,115200*1B |
| 设置UART0波特率为256000 | $PAIR864,0,0,256000*1D |
| 设置UART0波特率为921600 | $PAIR864,0,0,921600*10 |
| 设置UART2只输出RTCM(默认) | $PAIR862,0,2,252*2D |
| 设置UART2只输出NMEA | $PAIR862,0,2,237*2E |
| 设置UART2输出NMEA+RTCM | $PAIR862,0,2,253*2C |
| 设置UART2波特率为9600 | $PAIR864,0,2,9600*11 |
| 设置UART2波特率为57600 | $PAIR864,0,2,57600*2A |
| 设置UART2波特率为115200 | $PAIR864,0,2,115200*19 |
| 设置UART2波特率为256000 | $PAIR864,0,2,256000*1F |
| 设置UART2波特率为921600 | $PAIR864,0,2,921600*12 |
| 设置数据输出速率为1Hz | $PAIR050,1000*12 |
| 设置数据输出速率为2Hz | $PAIR050,500*26 |
| 设置数据输出速率为4Hz | $PAIR050,250*24 |
| 设置数据输出速率为5Hz | $PAIR050,200*21 |
| 设置数据输出速率为10Hz | $PAIR050,100*22 |
| 获得模块版本信息 | $PAIR020*38 |
| 设置为静态定位(基站)模式 | $PAIR092,1*2C(见示例:设置为基准站) |
| 设置为普通定位(流动站)模式(默认) | $PAIR092,0*2D(见示例:设置为流动站) |
| 保存所有配置 | 先输入 $PAIR003*39再输入$PAIR513*3D |
| 恢复出厂设置 | 先输入 $PAIR003*39再输入$PAIR514*3A最后输入$PAIR513*3D |
| 重启模块 | $PAIR023*3B |
每一条指令后面要追加\r\n(回车换行,同NMEA消息格式一样)
示例1: 修改波特率
- 使用864指令修改波特率,如修改UART0波特率为921600:
$PAIR864,0,0,921600*10 - 使用513指令保存配置:
$PAIR513*3D - 重新上电生效配置
示例2: 修改NMEA输出内容
使用062指令设置某一条NMEA语句是否输出(所有UART口同时生效):
- 使能GGA输出:
$PAIR062,0,1*3F - 禁止GGA输出:
$PAIR062,0,0*3E - 使能GSA输出:
$PAIR062,2,1*3D - 禁止GSA输出:
$PAIR062,2,0*3C - 使能GSV输出:
$PAIR062,3,1*3C - 禁止GSV输出:
$PAIR062,3,0*3D - 使能RMC输出:
$PAIR062,4,1*3B - 禁止RMC输出:
$PAIR062,4,0*3A - 使能VTG输出:
$PAIR062,5,1*3A - 禁止VTG输出:
$PAIR062,5,0*3B - 使能ENU输出:
$PAIR062,6,1*39 - 禁止ENU输出:
$PAIR062,6,0*38 - 使能GST输出:
$PAIR062,8,1*37 - 禁止GST输出:
$PAIR062,8,0*36
- 使能GGA输出:
使用513指令保存配置:
$PAIR513*3D重新上电生效配置
示例3: 修改输出速率
使用050指令修改输出速率,如修改输出速率为2Hz:
$PAIR050,500*26。(RTK模式下最高只支持1Hz输出,单点定位模式下可支持最大10Hz输出, 所有UART口同时生效)如需掉电保存:则需要先关掉GNSS子系统:
$PAIR003*39, 再输入保存配置指令$PAIR513*3D重新上电
示例4: 设置为基准站
- 使用
$PAIR092,1*2C设置为静态基准站模式 - 使用513指令保存配置:
$PAIR513*3D - 重新上电生效配置,模块首次定位后会自动平均当前一段时间内结果,并将平均值锁定,锁定后输出位置不再变化,根据观测环境需用时30-60s,如果模块始终在高速移动或者观测环境极差(例如室内密闭环境),则模块不会锁定当前位置。
示例5: 设置为流动站(出厂默认)
- 设置为流动站模式:
$PAIR092,0*2D - 使用513指令保存配置:
$PAIR513*3D - 重新上电生效配置
示例6: 获得模块版本信息
- 发送
$PAIR020*38 - 模块返回
$PAIR020,AG3335A_V1.6.0_20220527,D,N,681e553,2112301617,2a1,0,2a1,0,925345cb,2112301606,0c051eb,2112301615,,*38
其中: V1.6.0为固件版本号, 20220527为固件编译日期。
RTK功能
RTK(载波动态差分)技术,他通过基准站播发的差分矫正报文(RTCM)来实现厘米级高精度定位。为获得厘米级精度的定位结果,通常需要用到RTK算法引擎,实际使用的操作是,在已知精确位置的地点设置基准站接收机,基准站接收机播发差分数据(包含基准站接收机的类型、位置、观测数据),流动站接收机实时接收差分数据和卫星信号,进行RTK解算,当流动站接收机消除观测数据中的误差,并且“固定”载波相位观测量的整周数,获得厘米级位置信息时,即实现了RTK固定解算。只要流动站准确的进入固定解算状态,并且跟踪的卫星没有失锁,差分数据没有中断,那么流动站就可以持续的提供厘米级的位置信息。但如果流动站最初的固定解算位置有偏差,或者因为环境遮挡等原因导致卫星信号失锁,或者因为数据传输链路导致差分数据中断,那么流动站提供的位置信息可能是分米级或者米级。
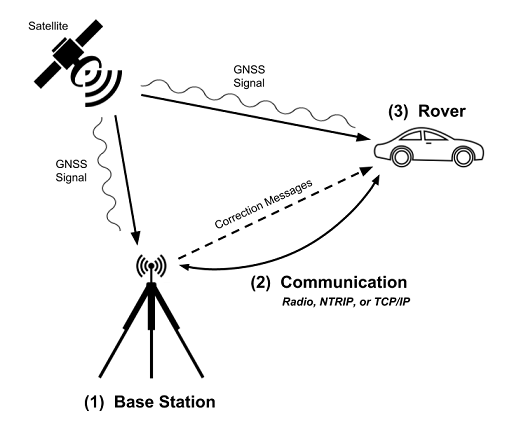
- Base Station:(基准站): 位置固定。向外播发差分校正报文(RTCM),可以是一个HI600模块或其他可输出RTCM数据流的板卡,也可以网络差分服务,比如千寻等。
- Rover(流动站): HI600模块,位置移动,它接收基站站传来的差分报文和GNSS卫星信号,并进行RTK差分计算,输出高精度位置信息。其中从基准站到流动站的差分报文可以通过任何介质传输(有线,无线,网络等),但是最终到HI600模块必须通过TTL串口输入。
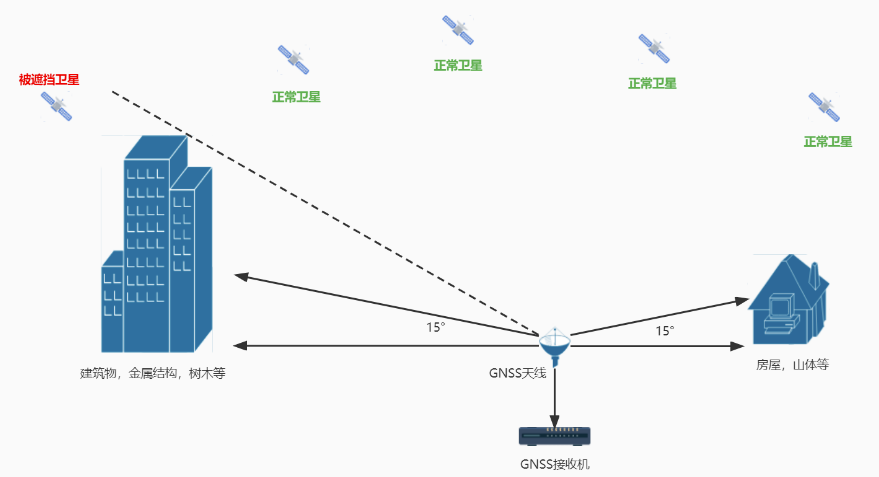
观测环境
天线遮挡示意图如下,完全无遮挡指地平线夹角15度以上无遮挡物体,包括建筑物,山体,金属结构,树木等等。
RTK功能特性
本模块内置RTK解算引擎,可通过UART0 或 UART2 的RX引脚输入RTCM3.3差分校正信息(如千寻或另外一块HI600模块)。开放天空下一般开机后20-30s进入fix状态。
RTK模式下输出速率固定为1Hz, 请不要在接入差分信息的状态下(RTK模式下)将数据输出频率设置到1Hz以上。
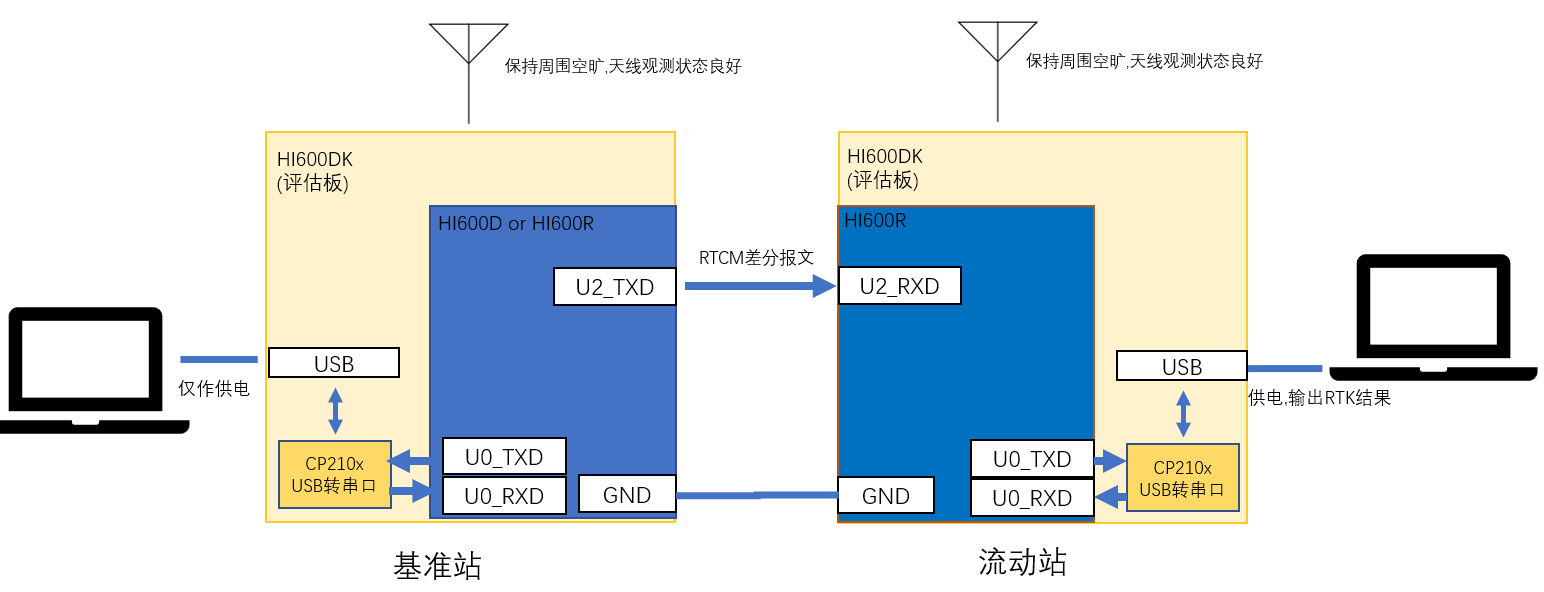
搭建最小RTK系统
下面给出一个最小系统示例:由两个HI600DK(HI600评估板)组成最小RTK差分系统,一个模块用作基准站,一个模块用作流动站:
- 两个评估板的USB口为USB转串口,默认连接到UART0。将两个评估板天线(第一次评估建议使用蘑菇头天线)连接,并放置在空旷环境中,使用USB给评估板供电。
- 使用杜邦线将基准站的UART2_TXD连接到流动站的UART2_RXD上,并且GND也要连接。
- 将流动站的HI600模块配置为流动站,基准站的模块配置为基准站. 具体配置步骤见 配置模块章节。
- 等待20-30s后观察流动站输出的NMEA报文,观测环境良好的情况下会输出高精度差分结果,说明RTK系统已经正常工作。
HI600模块需要较大启动电流才能工作,使用评估板时,请将USB直接连接到PC 或者通过自供电USB hub连接。
参考设计
最小系统
HI600系列最小系统如下图所示:
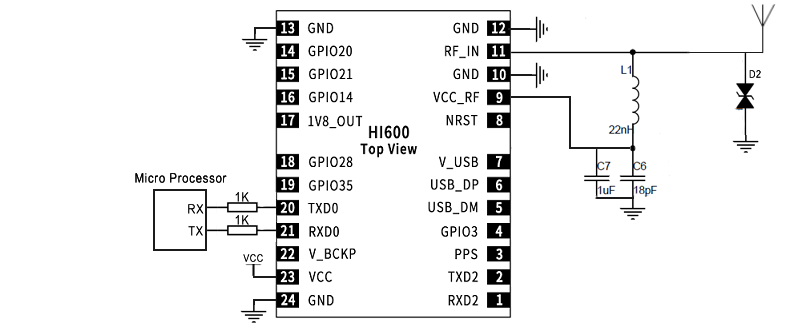
天线需要做50Ω阻抗匹配,推荐使用4层板,以便获得更好的电源回路
Layout注意事项
本产品为贴片模块,为最好的实现性能,需要将模块装到PCB 上,它的贴装位置可能影响从RF 天线到模块RF输入脚射频信号,同时有可能导致干扰进入模块内部的敏感部分,在确定线路布局时,天线相对于模块的位置接地,屏蔽和来自其他数字设备的干扰是至关重要的问题,需要非常仔细地进行考虑:
- 为避免射频信号损失,天线连接到模块输入端线路必须尽可能短。
- 正确的设计GND,注意避免射频部分通过GND 传递噪声。
- 射频电路和数字电路需明确分开,将模块的数字部分靠近主板的数字部分,射频和天线尽可能远离电路板上的其他数字电路。
- 散热处理:在设计过程中,不要将模块放置在热源或冷却源附近。模块的晶振对环境温度的突然变化非常敏感,这可能会对卫星信号跟踪产生不利影响。电源可以包括位于同一位置的电源设备、冷却风扇或通过PCB 的热传导。在接收器中进行设计时,请注意考虑:远离热源和冷却源。
电源
HI600电源系统主要包括VCC、V_BCKP、V_USB输入电源和1V8_OUT、VCC_RF输出电源。
主输入电源VCC
VCC为系统提供主要供电电源、可以选择500ma以上的LDO或者DC-DC作为系统主电源。,输入电压参考3.3电气与机械参数
备份电源输入V_BCKP
如果系统接入V_BCKP,系统可以保持热启动或者温启动,并且可以维持时间,如果系统没有接入V_BCKP,系统每次会维持冷启动,HI600系列的V_BACKP内部连接图如下:
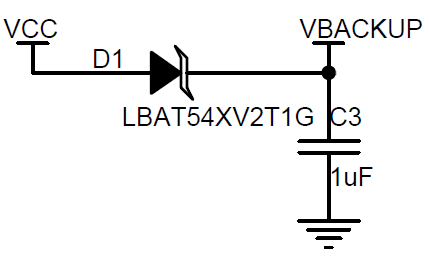
推荐的V_BCKP供电电路如下:
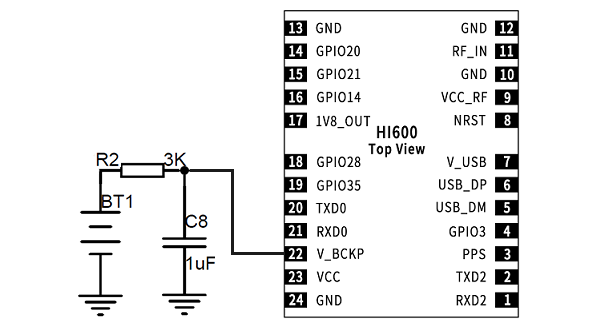
所涉及元器件规格如下:
| Reference | Part | Vendor | P/N |
|---|---|---|---|
| D1 | LBAT54XV2T1G | LRC | LBAT54XV2T1G |
| R2 | 3K | YAGEO | RC0402DR-073KL |
| C8 | 1uF | YAGEO | CC0402KRX5R6BB105 |
| BT1 | ML414H-IV01E | Seiko | ML414H-IV01E |
V_BCKP如果不用需悬空
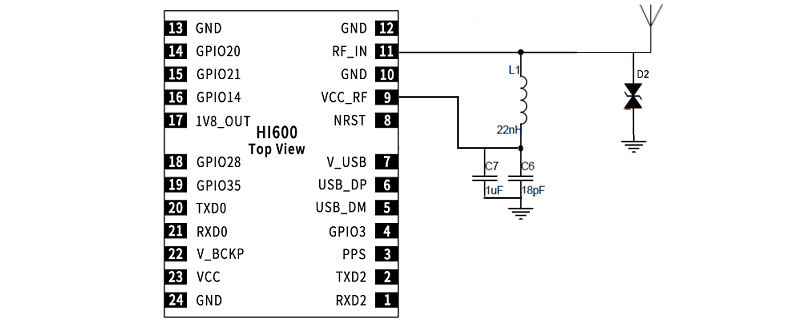
有源天线供电电源VCC_RF
HI600系列内部VCC_RF直接与VCC相连,可以为有源天线供电。
VCC_RF电路设计可以参考 有源天线电路设计 章节
复位电路
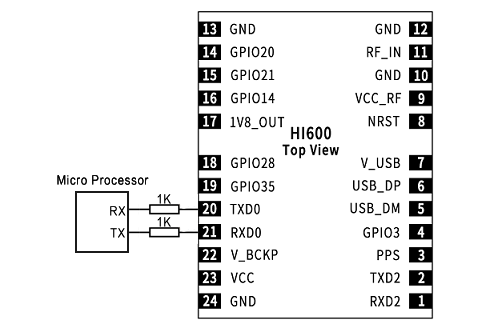
HI600内置阻容复位电路,用户无需再单独增加复位电路,但是由于复位引脚是1.8V逻辑电平,用户在接线时如有条件可以增加电平转换电路,如果没有条件增加电平转换电路,需要将RST串接1K电阻与MCU的IO相连。
数据接口
本模块支持双串口配置,UART IO信号为TTL电平(2.8V逻辑),默认波特率为115200。波特率/协议输出种类和速率用户均可配置。参考电路如下图:
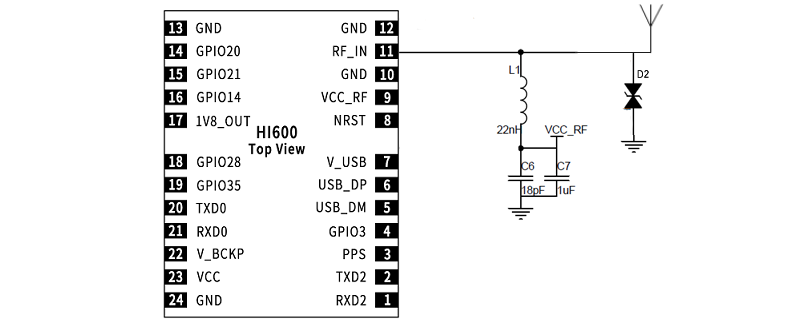
有源天线设计
外部电源为天线供电
内部电源为天线供电
| Reference | Part | Vendor | P/N |
|---|---|---|---|
| D2 | PESD0402-140 | LittelFuse | PESD0402-140 |
| L1 | 22nH | TAIYO | HK100522NJ-TV |
| C6 | 18pF | YAGEO | CC0402JRNPO9BN180 |
| C7 | 1uF | YAGEO | CC0402KRX5R6BB105 |
有源天线规格
为获得最佳定位效果推荐使用支持如下频段的蘑菇头测量天线:
- GPS:L1/L2/L5
- BDS:B1/B2/B3
- GLONASS:L1/L2
- GALILEO:E1/E2/E5a/E5b/E6
- L-Band
焊接
HI600满足IPC/JEDEC 标准的无铅焊接要求,即回流焊,峰值温度高达260°C。
推荐的焊接条件:
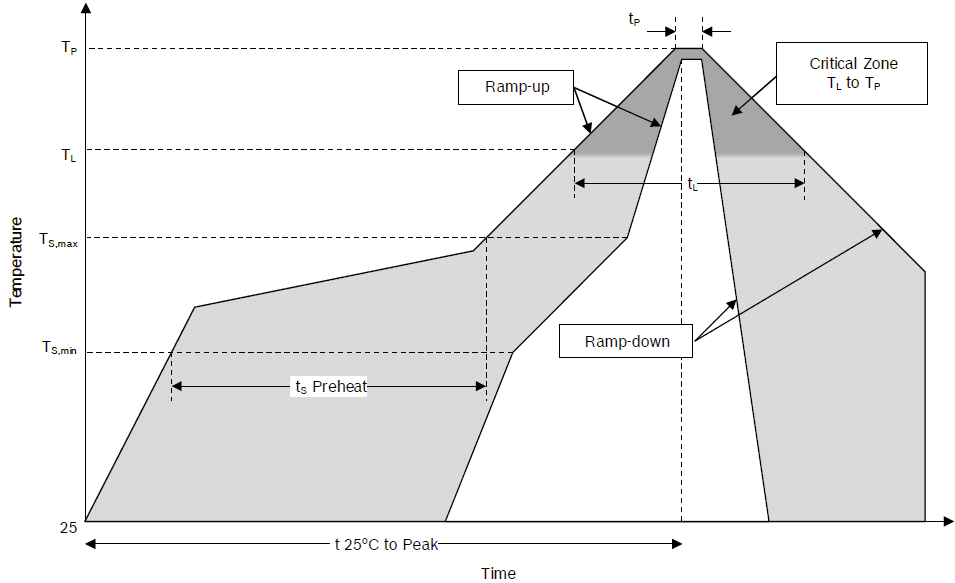
| 参数类型 | 无铅 |
|---|---|
| Average ramp-up rate (T~Smax~ to T~p~) | 3℃/s max |
| Temperature min (T~Smin~) | 150℃ |
| Temperature max (T~Smax~) | 200℃ |
| Time (T~Smin~ to T~Smax~) | 60-180s |
| Temperature (T~L~) | 170℃ |
| Time (t~L~) | 60-150s |
| Peak classification temperature (T~P~) | 260℃ |
| Time within 5 °C of actual peak temperature (t~p~) | 20-40s |
| Ramp-down rate | 6℃/min max |
| Time 25°C to peak temperature | 8 min max |
- 模块贴片生产过程,推荐只使用一次回流焊,即贴模块的一面最后过炉。
- 焊接温度的设置取决于产推荐品工厂的诸多因素,如主板性质、锡膏类型、锡膏厚度 等,请同时参考相关 IPC 标准以及锡膏的指标。
PPS 秒脉冲
本模块PPS引脚可输出1Hz标准秒脉冲,与UTC时间同步,可用于高精度授时应用。PPS精度测试:GNSS测量型天线通过一分二功分器分别给HI600接收机和共视型(接收机)服务器卫星信号,共视型(接收机)服务器与某地授时中心共视比对进行时间同步,输出PPS作为基准源,和HI600输出的PPS接入到SR620时间间隔计数器进行24小时连续的时间间隔测量。本实验两种接收机所用馈线均严格等长。
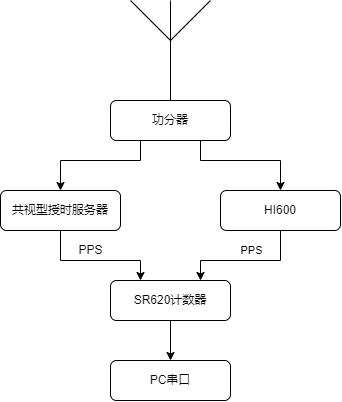
PPS与SR620标准时钟源误差曲线:
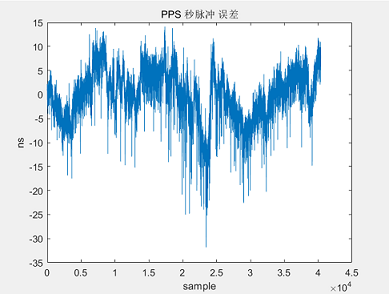
RMS:4.8825ns
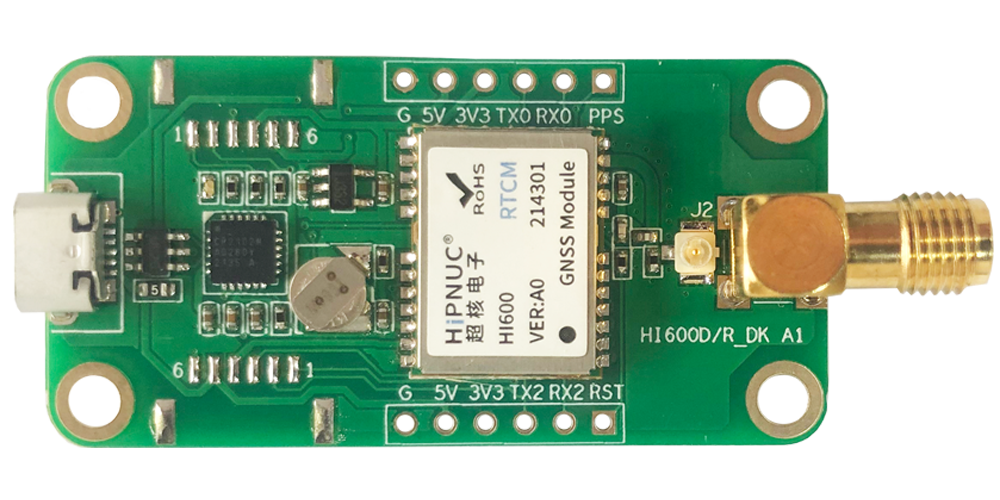
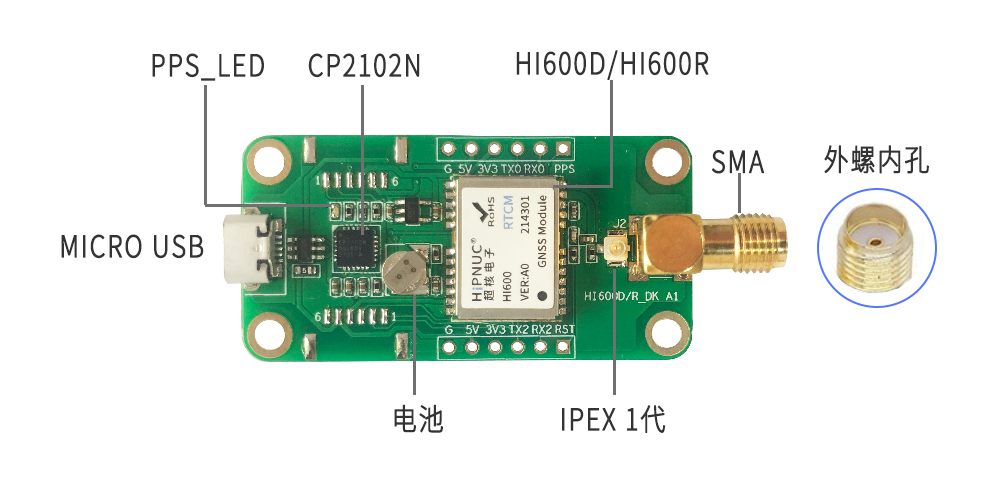
评估板
HI600DK是专门设计适配HI600系列高精度定位模组的调试板,方便客户与自己的PC主机相连接。HI600DK拥有如下特点:
板载USB转串口(CP2102N)
Micro USB 接口,配USB数据线
2.54排针数据接口
板载HI600D/HI600R模组
订购信息
| 料号 | 名称 | 型号 |
|---|---|---|
| PE01_3053 | 高精度双频定位模块带调试板 | HI600D_DK |
| PE01_3054 | 高精度双频RTK定位模块带调试板 | HI600R_DK |
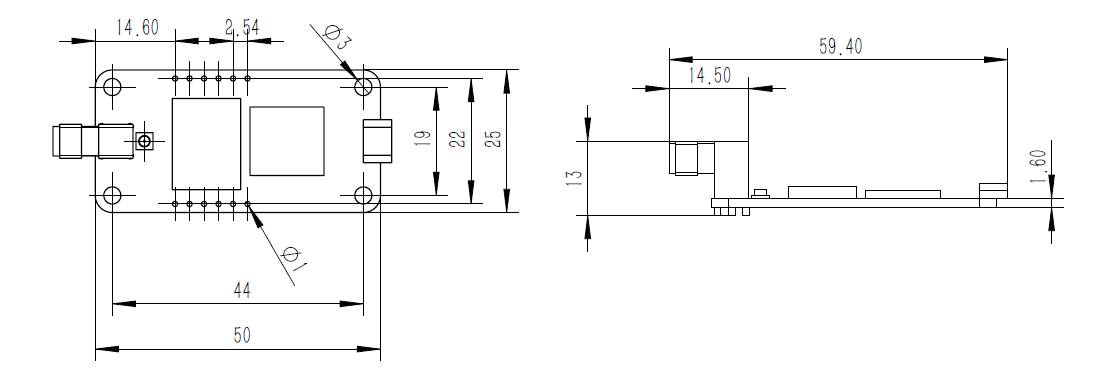
机械与电气特性
所有标注单位均为mm
引脚定义
| 引脚定义 | 类型 | 电平逻辑 | 描述 |
|---|---|---|---|
| G | 电源地 | - | Ground |
| 5V | 电源输入 | - | 5V电源输入 |
| 3V3 | 电源输入 | - | 3.3V电源输入 |
| RST | I | 1.8V | 10us低脉冲可复位模块,内部上拉,不用可悬空 |
| PPS | O | 2.8V | PPS输出,1Hz,脉宽100ms |
| TX2 | O | 2.8V | 备用串口 |
| RX2 | I | 2.8V | 备用串口 |
| TX0 | O | 2.8V | 模块串口发送(与主机接收相连) |
| RX0 | I | 2.8V | 模块串口接收(与主机发送相连) |
电气与机械特性
| 类型 | 条件 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|---|
| 电源输入5V | - | 4.8 | 5 | 5.25 | V |
| 电源输入3.3V | - | 3.2 | 3.3 | 3.6 | V |
| 功耗P | USB供电,天线未接 | 245 | - | 305 | mW |
| IO电平 | - | -0.3 | - | 3.6 | V |
| IO电平阈值VIH | - | 1.5 | - | 3.6 | V |
| IO电平阈值VIL | - | - | - | 0.6 | V |
| IO电流VIO | - | -10 | - | 10 | mA |
| ESD | USB接口 | ±15KV | |||
| 工作储温度 | -20℃-60℃ | ||||
| 振动冲击 | 2000g | ||||
严禁用户在使用过程中超过上述所规定的电流电压范围
设计资料
HI600DK原理图
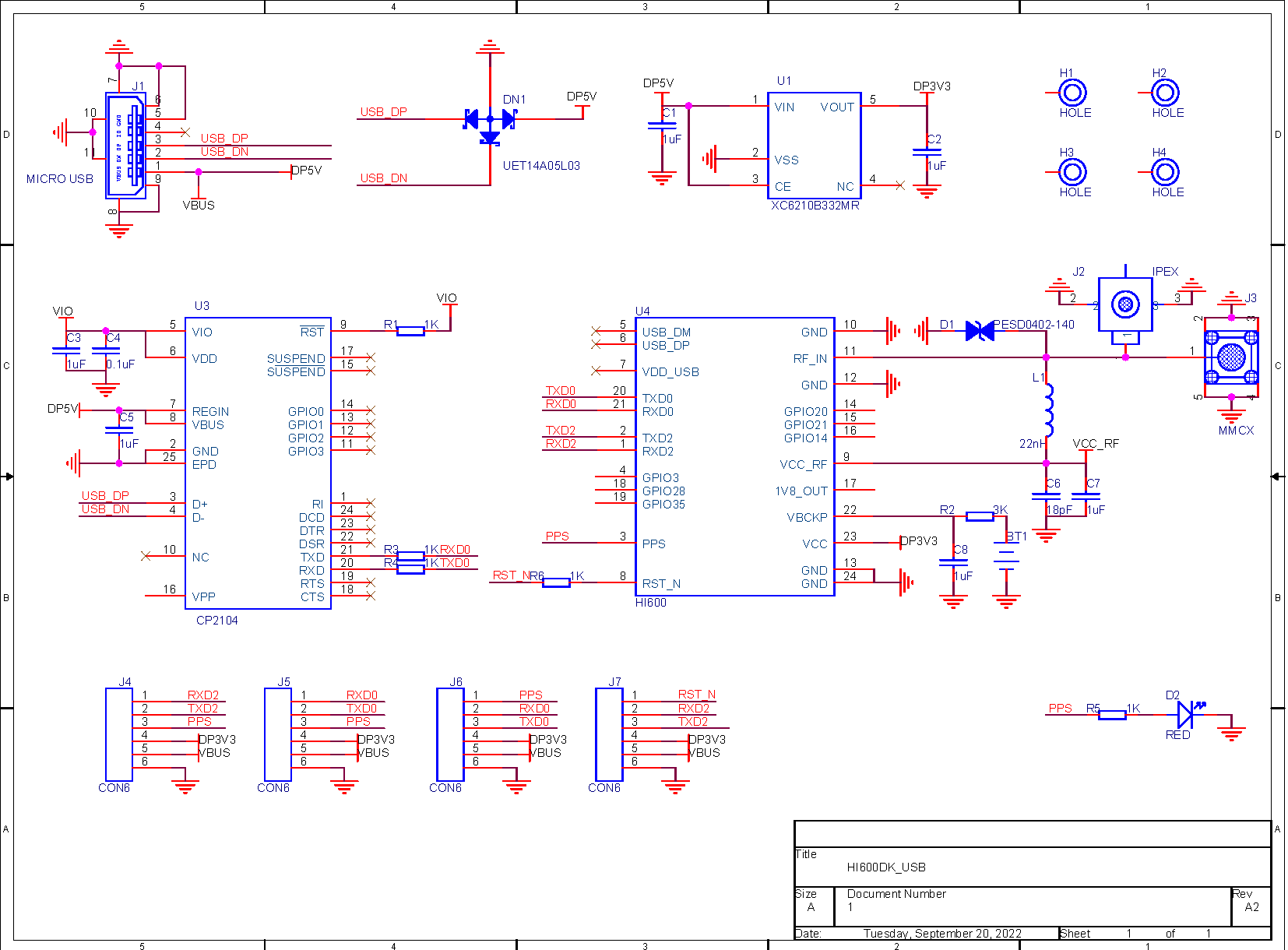
HI600DK BOM
| Quantity | Reference | Part | Vendor | Vendor P/N |
|---|---|---|---|---|
| 1 | BT1 | Li | Seiko | ML414H-IV01E |
| 6 | C1,C2,C3,C5,C7,C8 | 1uF | YAGEO | CC0402KRX5R6BB105 |
| 1 | C4 | 0.1uF | YAGEO | CC0402KRX5R6BB104 |
| 1 | C6 | 18pF | YAGEO | CC0402JRNPO9BN180 |
| 1 | DN1 | UET14A05L03 | Brightking | UET14A05L03 |
| 1 | D1 | PESD0402-140 | LittelFuse | PESD0402-140 |
| 1 | D2 | GREEN | MEIHUA | MHT136UGCT |
| 1 | F1 | Fuse | JK | JK-SMD0603-050-6 |
| 1 | J1 | MICRO USB | MOLEX | 1051640001 |
| 1 | J2 | IPEX | HRS | U.FL-R-SMT-1(80) |
| 1 | J3 | SMA | kinghelm | KH-SMA-K513-G |
| 1 | L1 | 22nH | TAIYO | HK100522NJ-TV |
| 5 | R1,R3,R4,R5,R6 | 1K | YAGEO | RC0402DR-071KL |
| 1 | R2 | 3K | YAGEO | RC0402DR-073KL |
| 1 | U1 | RS3236-3.3YF5 | RUNIC | RS3236-3.3YF5 |
| 1 | U3 | CP2102N-A02-GQFN24R | Silicon labs | CP2102N-A02-GQFN24R |
| 1 | U4 | HI600D/HI600R | HiPNUC(超核) | HI600D/HI600R |
附录A-技术支持
新产品信息及技术支持,请关注超核电子公众号和官方网站